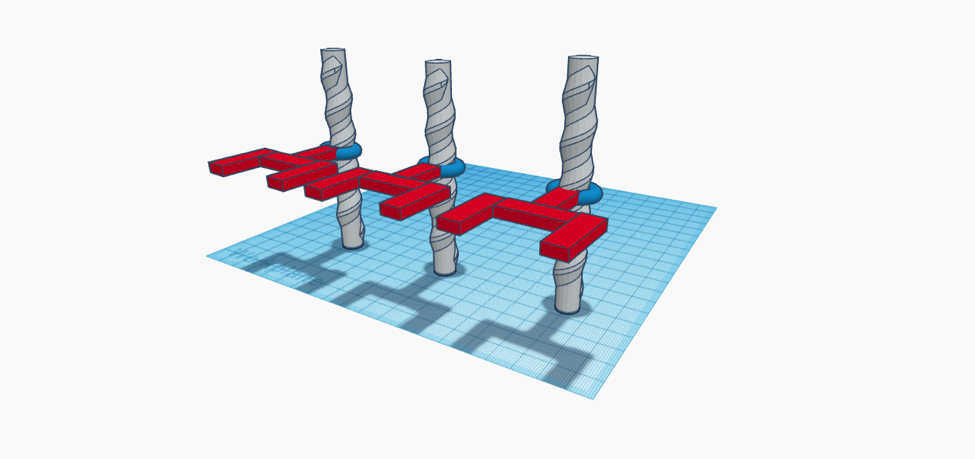
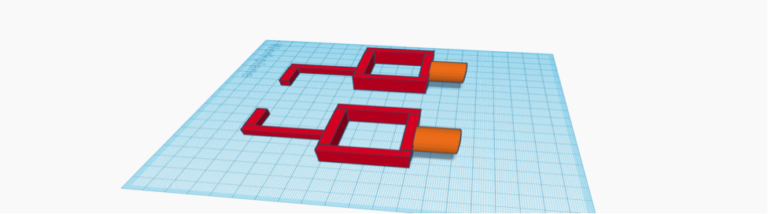
Last week, we worked on our individual tasks and set up our own Raspberry Pi s to perform all the tasks we will have to accomplish at our respective homes. Our goal last week was to design a mechanism for the robot to grab the blocks and stack them one on top of the other in Tidy Up The Toys AND make an algorithm for the robot to follow the line in Up the Garden Path. I took charge of the first task while Vidyut, another member of our team and the main logician for our robot, took charge of the second task. I cracked my head over the mechanisms and finally came up with 2 mechanisms and made 3D versions of them. Below are rough images of the two designs.
In the first design, there are three grabbers which grab the blocks and stack them one on top of the other. They move up, down, and side to side through the rods. In the second design, there are two grabbers which move up and down and stack the blocks one on top of the other. In the end, we all decided to implement the first design as it was faster and would bring out better results.
For the second task, Vidyut made an algorithm for the robot to detect the line in a much accurate and faster way than before. This time, we used four IR sensors instead of two, two on the right and two on the left. So in case the first sensor doesn’t detect the line, the second sensor will. This also helped the robot maneuver easily through the curves and steep turns in the track.
Therefore, we finished our goals for the week and we plan to focus more on Feed The Fish and Tidy Up The Toys from now on. So, that’s it for this week’s blog!